咨询电话
SMT设备
大型在线式贴片机
TS系列
TM系列
CHM-8系列
模组式在线贴片机
TC系列
高精研发打样型贴片机
CHM-5系列
CHM-4系列
CHM-3系列
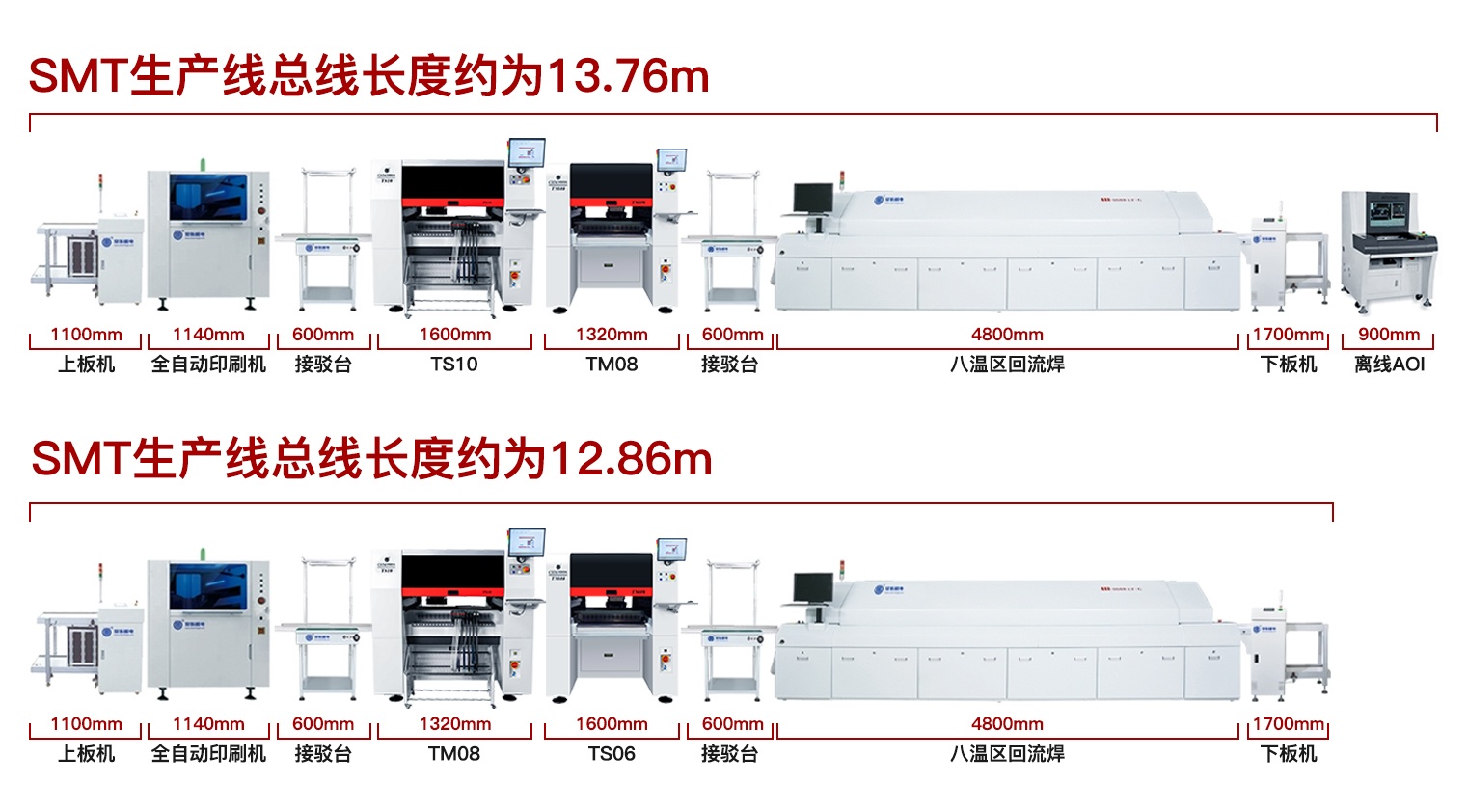
生产线方案配置
回流焊
常衡TS20贴片机
常衡TS10贴片机
大型生产线方案配置
常衡TM08贴片机
常衡LS08贴片机
【常衡机电】TC06 六头模组泛用贴片机
SMT行业
【常衡机电】一家集研发制造与一体的高端SMT贴片机厂家,强大的研发团队,高于行业水平的速度与精度以及超40多亩的SMT智造产业园。35um全自动高精高速贴片机、...
在电子制造产业高速发展的浪潮中,贴片机作为SMT产线的核心设备,直接决定着生产效率和产品质量。面对市场上琳琅满目的贴片机型号,如何避免选型误区?常衡机电凭借16
湖南常衡机电是一家自动化设备生产企业,以研发和制造高速高精度贴片机、smt贴片机、led贴片机、高速高精度贴片机以及自动化贴片机为主的贴片机生产厂家,是专业生产...
【常衡机电】一家集研发制造销售于一体的高端SMT贴片机厂家,强大的研发团队,领先行业水平的速度、精度与稳定性,以及超30多亩的SMT智造产业园。精度35um C...
在精密复杂的电子制造领域,SMT贴片机无疑扮演着举足轻重的角色,以其高效、精准的性能,默默推动着电子产品生产的滚滚向前。今天,我们就来一场深度探索,从手动到全自
我们的优势
01公司综合实力
02专业开发与工艺设计
03原材料采购质量严控
04完善的服务体系
SMT技术
在电子制造业,贴片机直接影响生产效率和产品质量。新手采购时若踩中陷阱,轻则损失数十万设备款,重则导致生产线瘫痪。本文结合常衡贴片机16年行业服务经验,揭露8大采
作为国家高新技术企业,湖南常衡机电自2009年成立以来,始终致力于SMT电子制造装备的研发与创新。凭借在运动控制、视觉识别、软件算法等领域的自主研发实力,公司已
常衡贴片机厂家介绍
常衡贴片机客户案例
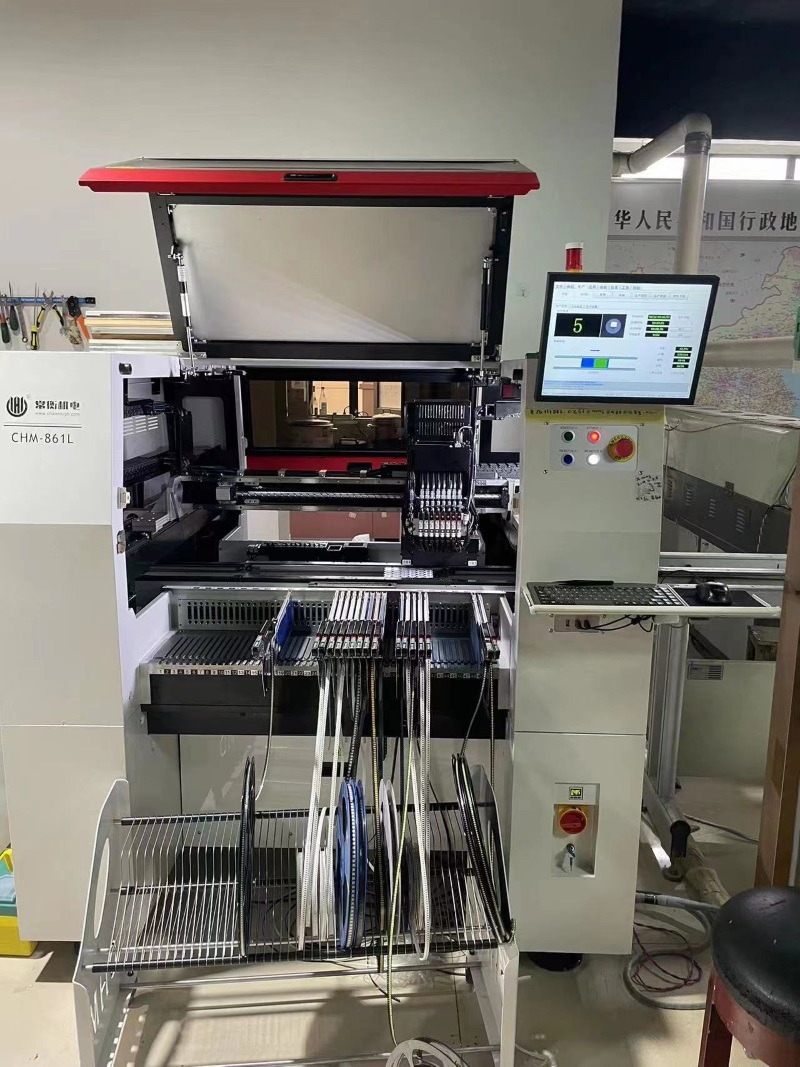
常衡CHM-861贴片机上海客户2
常衡SMT产线CHM-861贴片机上海客户
常衡CHM-861L贴片机郑州客户
常衡SMT产线江西客户
常衡SMT产线惠州客户
常衡SMT贴片机惠州客户
常衡贴片机河北客户
常衡SMT贴片机河北客户
常衡smt产线安徽客户
Copyright © 2013-2024 湖南常衡贴片机 版权所有
备案号:湘ICP备18021313号-1 湘公网安备 43019002001475号
地址:湖南省长沙市高新区明湖路392号-常衡机电
咨询电话:0731-85504084
邮箱:one@charmhigh.com / sales@charmhigh.com
天猫店铺


 TS系列
TS系列